|
Bezrozměrné normované vyjádření
Chceme-li získat obecně uplatnitelné, vzájemně
porovnatelné a přenositelné závěry ze zjištěných důsledků v nastavení regulátoru,
zavedení bezrozměrného vyjádření v hodnotách i čase umožňuje jedním bezrozměrným
modelem reprezentovat celou třídu staticky a dynamicky podobných regulovaných
soustav. S výhodou tak lze formulovat pravidla a vzorce pro optimální nastavení
regulátorů odvozená pro bezrozměrné vyjádření a ty pak přepočítat pro konkrétní
číselné hodnoty rozměrového vyjádření. Bezrozměrná a rozměrová interpretace
průběhu regulace je popsána v příkladu 1.
Příklad 2.1- zadání:
Jaká je rozměrová interpretace bezrozměrného průběhu
PI regulace proporcionální soustavy prvního řádu a nastavení regulátoru, lze-li
odečíst a jsou-li známy následující údaje:
 , , - bezrozměrná doba regulace (pásmo 1 %) 2,6,
- zesílení v přenosu akční veličiny na regulovanou
ku = 10 kPa/mm, poruchové na regulovanou
- kv= 25 kPa/mm,
- z výchozí hodnoty akční veličiny realizované
nastavením polohy kuželky ventilu na 5 mm zbývá do maximálního otevření ještě
15 mm.
Příklad 2.1- řešení:
Snadný je převod časových údajů. Doba
regulace v časových jednotkách je dána součinem bezrozměrné doby regulace 2,6
a časové konstanty T1= 20 s, která je vztažnou hodnotou
pro bezrozměrný čas. Ukončení regulace v pásmu 1 % nastane pro zadané údaje
asi za 52 sekund. Bezrozměrná regulační odchylka využívá jako vztažnou hodnotu
změnu regulované veličiny, kterou by způsobila maximální proveditelná změna
akční veličiny, tj. 15 mm × ku= 150 kPa. Přeregulování činí
15 kPa a 1% pásmo ustálení odpovídá toleranci ą1,5 kPa.
Dojde-li při regulaci ke změně akční
veličiny o um= 15 mm, kompenzuje se tím účinek poruchové
veličiny, který by na regulované veličině při vyřazeném regulátoru představoval
změnu o -150 kPa. Změna poruchové veličiny se realizuje změnou otevření odběrního ventilu, která je měřena zdvihem kuželky
(- 150 kPa) / kv = 7 mm. Tato
změna představuje změnu poruchové veličiny o 100 %, tedy maximální změnu, kterou
lze ještě regulací zvládnout.
Bezrozměrné hodnotě zesílení
 odpovídá rozměrová hodnota odpovídá rozměrová hodnota
Obdobně integrační časová konstanta odpovídající bezrozměrné hodnotě integrační konstanty
 je je
Příklad 2.1- závěr:
Příklad ukazuje snadnou převoditelnost závěrů ze simulace bezrozměrně popsaného regulačního obvodu, tj. že např. PI regulace proporcionální setrvačné soustavy prvního řádu s nastavením zesílení a integrační konstanty na hodnotu 7,5 garantuje odstranění poruchy s regulační odchylkou, která nepřekročí 10 % hodnoty změny regulované veličiny, která by nastala bez regulace.
|
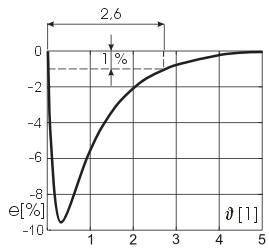
Obr. 2 Záznam průběhu bezrozměrné
regulační odchylky jako podklad pro jeho převod na rozměrovou interpretaci
podle příkladu 1 |
Zpět
|